今回もこれまでに引き続いてJuliaとmodelicaの連携を実践してみます。
今回は「魚の体重」をJuliaとmodelicaを使ってPI制御してみます。
魚の体重の数理モデル
魚の体重の増加量を表す数理モデルとしてフォン・ベルタンフィーモデルが知られています。
ここでは魚の体重を示します。また右辺第1項は栄養分による体重の増加を、第2項は呼吸による体重ロスを表します。
今回はエサの量≒係数を入力とし、魚の体重
をコントロールします。
過去に同様の数理モデルを使ってフィードバック制御をした際の記事は以下になります。この記事ではJuliaのみでのシミュレーションでした。
システムの全体像
今回構築するシステムの全体像は以下のようになります。
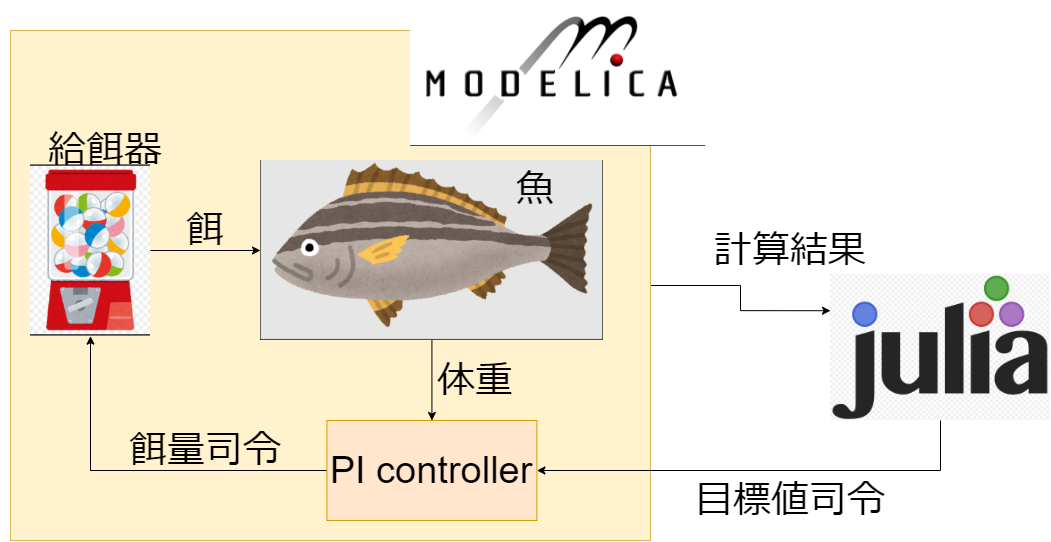
modelicaで以下の数理モデルを構築します。オブジェクトとして『魚』『PIコントローラー』『給餌器』の3つがあります。 それぞれの役割は以下です。
- 魚……餌量と体重の関係を実装します。フォン・ベルタンフィーモデルを実装します。
- PIコントローラー……魚の体重が目標値になるように、餌量を給餌器に指示します。
- 給餌器……PIコントローラーからの指示にあった餌量を、魚に供給します。
そして、上記modelicaの数理モデルを、Juliaから操作します。魚の体重の目標値を与えたり、実行司令や計算結果の受け渡し、計算結果の描画等を実行します。
modelicaのモデル
今回作成したmodelicaのモデルを紹介します。 なお、コードは以下書籍を参考にしています。
")
Modelicaによるシステムシミュレーション入門 -モデルベース開発のための物理システムモデリング- (MBD Lab Series)
- 作者:Peter Fritzson
- 発売日: 2015/07/15
- メディア: 単行本(ソフトカバー)
魚
フォン・ベルタンフィーモデルを実装しています。 魚の体重の初期値は10としています。
model Fish
WeightSignal wSensor ;
Foodflow foodIn;
parameter Real beta = 1;
Real w(start=10)"Fish weight";
equation
der(w) = foodIn.fflow*w^(2/3) - beta*w;
wSensor.val = w;
end Fish;
PIコントローラー
PI制御を実装しています。今回比例ゲイン=0.01, 積分時間=1 としています。
model PIcountinuousController
WeightSignal cIn;
FoodSignal cOut;
parameter Real K=0.01 "Gain";
parameter Real T=1 "Time Constans";
Real ref "Reference level";
Real error "Deviation level";
Real outCtr "Output contril signal";
Real x;//State variable of continuous PI controller
equation
error = ref - cIn.val;
der(x) = error/T;
outCtr = K*(error +x);
cOut.fval = outCtr;
end PIcountinuousController;
給餌器
PIコントローラーからの餌量司令によって餌を供給します。最小の餌量を0, 最大の餌量を100とするための関数LimitValueを実装しています。
model FoodSource
Foodflow foodOut;
FoodSignal order;
parameter Real foodmin = 0;
parameter Real foodmax = 100;
equation
foodOut.fflow = LimitValue(foodmin,foodmax,order.fval);
end FoodSource;
function LimitValue
input Real pMin;
input Real pMax;
input Real p;
output Real pLim;
algorithm
pLim := if p>pMax then pMax
else if p<pMin then pMin
else p;
end LimitValue;
コネクタ類
今回、『魚』『PIコントローラー』『給餌器』のオブジェクト間を、『魚の体重情報』『餌』『餌量の司令値情報』の3つが行き交いますのでそれぞれのコネクタを実装してやります。
connector WeightSignal"Reading fish weight"
Real val;
end WeightSignal;
connector FoodSignal"Signal to food mass"
Real fval;
end FoodSignal;
connector Foodflow "Food flow"
Real fflow;
end Foodflow;
まとめのモデル
最後に各オブジェクトを配置したモデルFishPIを作ります。このモデルを実行することでシミュレーションが可能です。体重の目標値m_iをinputとしてJuliaから入力するようにします。
model FishPI
Fish fish;
FoodSource source;
PIcountinuousController pi;
input Real m_i;
output Real wei;
equation
connect(source.foodOut, fish.foodIn);
connect(fish.wSensor, pi.cIn);
connect(pi.cOut, source.order);
wei = fish.w;
pi.ref = m_i;
end FishPI;
Juliaの実装とシミュレーションの実行
今回もopen modelicaのJulia APIであるOMJuliaを使用して、Juliaからmodelicaモデルを実行します。 これまでの関連記事は以下です。
コードは以下のようになります
using Plots using OMJulia tnk = OMJulia.OMCSession(); tnk.ModelicaSystem("FishWeight.mo","FishWeight.FishPI"); tnk.setSimulationOptions(["stopTime=100"]); tnk.setInputs("m_i = [(0,80),(20,80),(50,40),(80,40)]") tnk.simulate(); tm,wei,ref = tnk.getSolutions(["time","wei","m_i"]); plot(tm,[wei,ref],title="PI control",xlabel="time[s]", label = ["weight" "set point"],lw=3)
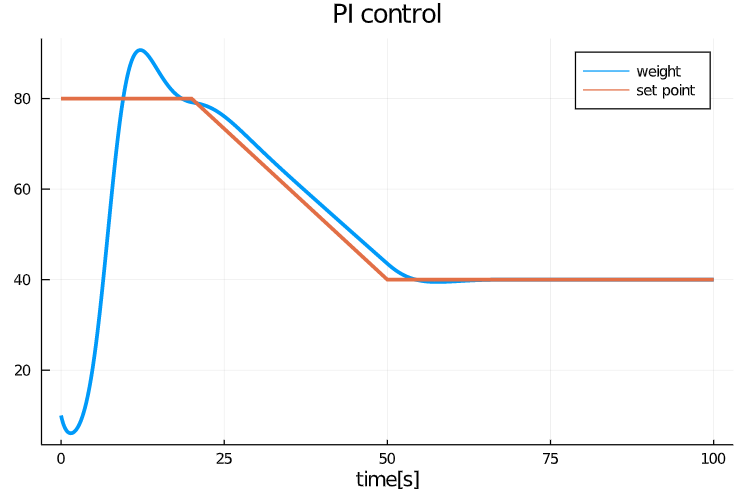
このようにJulia上で目標値を設定し、シミュレーションを実行、結果の描画もできるようになりました。
今回はここまでにします。